Backward Euler evaluates at the next time step instead of the current one, making it implicit: appears on both sides, requiring a solve at each step. This extra cost buys unconditional stability: the method is stable for any step size when . For stiff problems, where explicit methods waste enormous effort satisfying stability constraints, this is essential.
Derivation¶
Integrate over one time step:
Forward Euler (Definition 1) approximates this integral by freezing the integrand at the left endpoint (a left rectangle rule). Backward Euler freezes it at the right endpoint instead:
This gives the backward Euler (or implicit Euler) method:
Definition 1 (Backward Euler Method)
The Cost of Implicitness¶
Each step of backward Euler requires solving an equation for .
Linear problems. For , we can solve algebraically:
No iteration needed.
Nonlinear problems. For general , we must solve the nonlinear equation
at every time step, using any of the root-finding methods from the nonlinear equations chapter (e.g., Newton’s method or a fixed-point iteration). The previous time step provides a natural initial guess, and for small convergence is typically rapid (1--2 iterations).
See the Euler’s method notebook for an interactive implementation.
Error Analysis and Convergence¶
Following the same analysis as for forward Euler, we obtain the same accuracy order.
Theorem 1 (Local Truncation Error of Backward Euler)
For backward Euler applied to with , the local truncation error is
Backward Euler has consistency order .
Proof 1
Theorem 2 (Convergence of Backward Euler)
Under the same Lipschitz conditions as Theorem 1, the global error of backward Euler satisfies
Backward Euler converges with order 1.
Proof 2
The argument is identical to the forward Euler convergence proof (Theorem 1). Backward Euler is a one-step method with consistency order , so the same error recurrence, Lipschitz bound, and discrete Grönwall argument apply.
Stability Analysis¶
Apply backward Euler to the test equation :
The stability function is where . Compare forward Euler’s (Definition 6).
Definition 2 (Stability Region of Backward Euler)
The stability region of backward Euler is
This is everything outside the disk of radius 1 centered at . In particular, it contains the entire left half-plane .
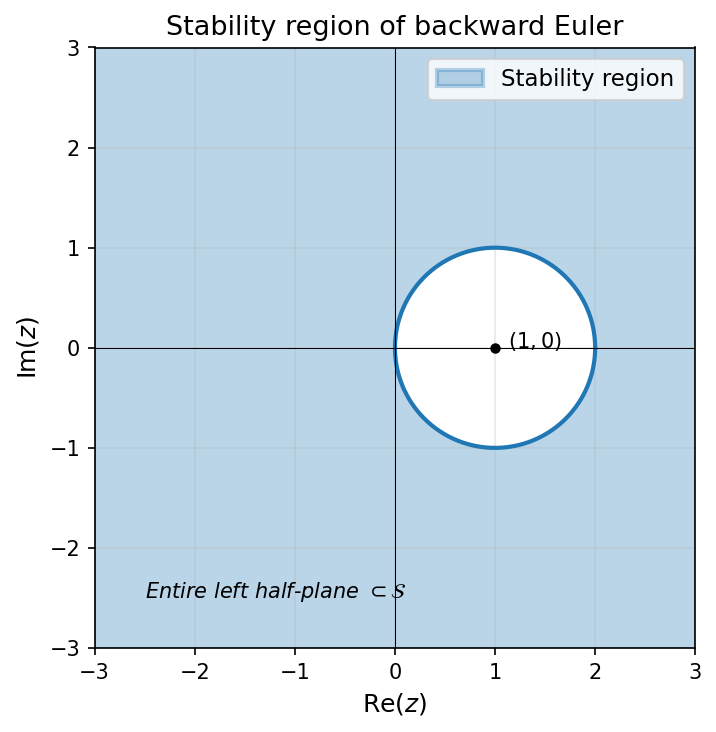
Stability region of backward Euler: everything outside the disk . The entire left half-plane is included, so backward Euler is stable for all whenever .
For , backward Euler is stable for all : unconditionally stable.
Compare forward Euler: restricts to a small disk around . Backward Euler: includes the entire left half-plane. No matter how large is, we can choose based on accuracy alone.
Stiffness¶
Stiff problems (Definition 7) arise whenever the ODE has widely separated time scales. The fast components demand small steps for explicit stability, even after those components have decayed to negligible levels. This is where backward Euler’s unconditional stability pays off.
Example 1 (The Prothero--Robinson Equation)
Consider with .
The exact solution is , independent of .
With , forward Euler requires for stability, but the solution varies on a scale of . The method is forced to take thousands of tiny steps tracking a transient that has already decayed.
Backward Euler with gives : stable and accurate with 100x fewer steps.
Example 2 (Heat Equation Semi-Discretization)
Discretize on with spacing :
This is a system where is tridiagonal with eigenvalues
The smallest eigenvalue is (slow modes) and the largest is (fast modes). The ratio as .
Forward Euler requires . With : , requiring 20,000 time steps to reach .
Backward Euler has no stability restriction. Choose based on accuracy alone; perhaps 100 steps suffice.