Deblurring Images#
import requests
from io import BytesIO
from PIL import Image
import numpy as np
import scipy.linalg as la
import matplotlib.pyplot as plt
from scipy.io import loadmat
plt.set_cmap('binary')
<Figure size 640x480 with 0 Axes>
Blurring images by Toeplitz matrices#
Represent a image as a matrix \(X\). Use the function scipy.linalg.toeplitz to create a Toeplitz matrices \(A_c\) and \(A_r\). Matrix multiplication on the left \(A_c X\) blurs vertically (in the columns) and on the right \(X A_r\) blurs horizontally (in the rows).
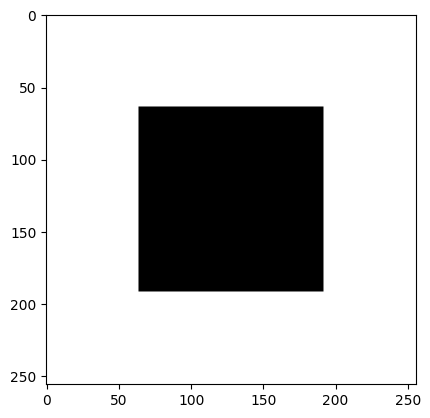
Let us create a \(N \times N\) matrix of zeros and ones such that represents the image of square.
N = 256
Z = np.zeros((N//4,N//4))
O = np.ones((N//4,N//4))
X = np.block([[Z,Z,Z,Z],[Z,O,O,Z],[Z,O,O,Z],[Z,Z,Z,Z]])
plt.imshow(X)
plt.show()
Create a Toeplitz matrix where the values decrease linearly from the diagonal.
c = np.zeros(N)
s = 5
c[:s] = (s - np.arange(0,s))/(3*s)
Ac = la.toeplitz(c)
plt.imshow(Ac[:15,:15])
plt.colorbar()
plt.show()
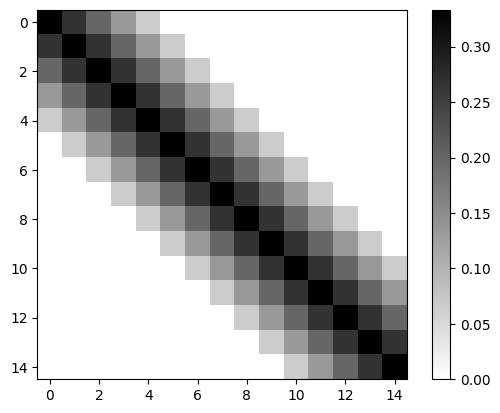
Check the condition number of \(A_c\).
np.linalg.cond(Ac)
np.float64(24782.331042559137)
Blur the image \(X\) vertically.
plt.imshow(Ac @ X)
plt.show()
Do the same but in the horizontal direction.
r = np.zeros(N)
s = 20
r[:s] = (s - np.arange(0,s))/(3*s)
Ar = la.toeplitz(r)
plt.imshow(X @ Ar.T)
plt.show()
Combine both vertical and horizontal blurring.
plt.imshow(Ac @ X @ Ar.T)
plt.show()
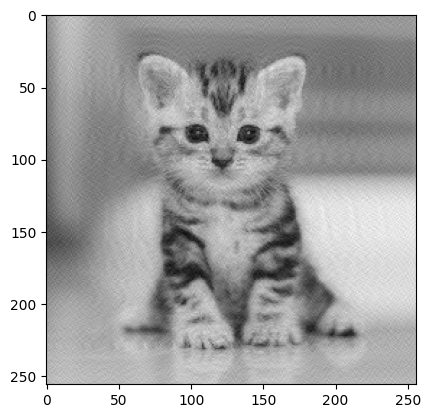
Inverting the noise#
Let \(E\) represent some noise in the recording of the image
How do we find \(X\)?
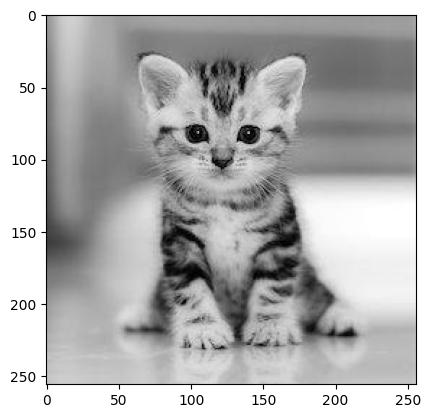
url = 'https://raw.githubusercontent.com/adrs0049/MATH545/master/notebooks/data/kitten.jpg'
page = requests.get(url)
kitten = np.asarray(Image.open(BytesIO(page.content))).astype(np.float64)
kitten.shape
(256, 256)
plt.imshow(kitten,cmap='gray')
plt.show()
B = Ac@kitten@Ar.T + 0.01*np.random.randn(256,256)
plt.imshow(B,cmap='gray')
plt.show()
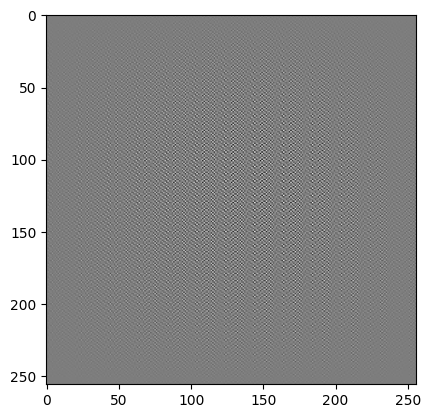
X1 = la.solve(Ac,B)
X2 = la.solve(Ar,X1.T)
X2 = X2.T
plt.imshow(X2,cmap='gray')
plt.show()
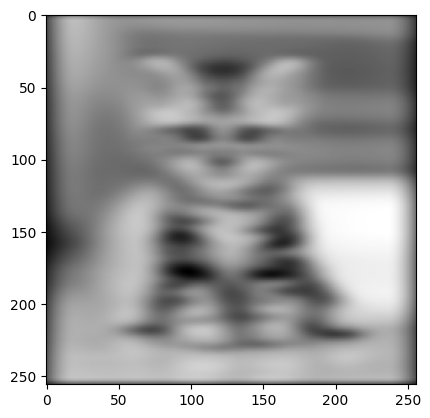
Truncated SVD#
We need to avoid inverting the noise therefore we compute using the truncated pseudoinverse
Pc,Sc,QTc = la.svd(Ac)
Pr,Sr,QTr = la.svd(Ar)
k = 200
Dc_k_plus = np.hstack([1/Sc[:k],np.zeros(N-k)])
Dr_k_plus = np.hstack([1/Sr[:k],np.zeros(N-k)])
Ac_k_plus = QTc.T @ np.diag(Dc_k_plus) @ Pc.T
Ar_k_plus = Pr @ np.diag(Dr_k_plus) @ QTr
X = Ac_k_plus @ B @ Ar_k_plus
plt.imshow(X,cmap='gray')
plt.show()