Error Analysis#
The condition number of a nonsingular matrix \(A\) is \(\mathrm{cond}(A) = \| A \| \| A^{-1} \|\). Given a linear system \(A \boldsymbol{x} = \boldsymbol{b}\), the condition number of \(A\) quantifies how sensitive the solution \(\boldsymbol{x}\) is relative to changes in \(\boldsymbol{b}\).
Vector Norms#
The Euclidean norm of a vector \(\boldsymbol{x} \in \mathbb{R}^n\) is
The Euclidean norm assigns a magnitude (or length) to a vector but it turns out that there are many different ways to define the “magnitude” of a vector!
A norm on \(\mathbb{R}^n\) is a function \(\| \cdot \|\) such that:
\(\| \boldsymbol{x} \| \geq 0\) for all \(\boldsymbol{x} \in \mathbb{R}^n\)
\(\| \boldsymbol{x} \| = 0\) if and only if \(\boldsymbol{x} = \boldsymbol{0}\)
\(\| c \boldsymbol{x} \| = |c| \| \boldsymbol{x} \|\) for any \(c \in \mathbb{R}\) and \(\boldsymbol{x} \in \mathbb{R}^n\)
\(\| \boldsymbol{x} + \boldsymbol{y} \| \leq \| \boldsymbol{x} \| + \| \boldsymbol{y} \|\) for all \(\boldsymbol{x} , \boldsymbol{y} \in \mathbb{R}^n\)
Condition 4 is called the triangle inequality. See Wikipedia:Norm.
Let \(1 \leq p < \infty\). The \(p\)-norm of a vector \(\boldsymbol{x} \in \mathbb{R}^n\) is given by
In particular, the 1-norm is given by
and the 2-norm is the familiar Euclidean norm
The \(\infty\)-norm of a vector \(\boldsymbol{x} \in \mathbb{R}^n\) is given by
The unit sphere in \(\mathbb{R}^n\) relative to a norm \(\| \cdot \|\) is the set of unit vectors
Compare the unit balls in \(\mathbb{R}^2\) for the 1-norm, 2-norm and \(\infty\)-norm:
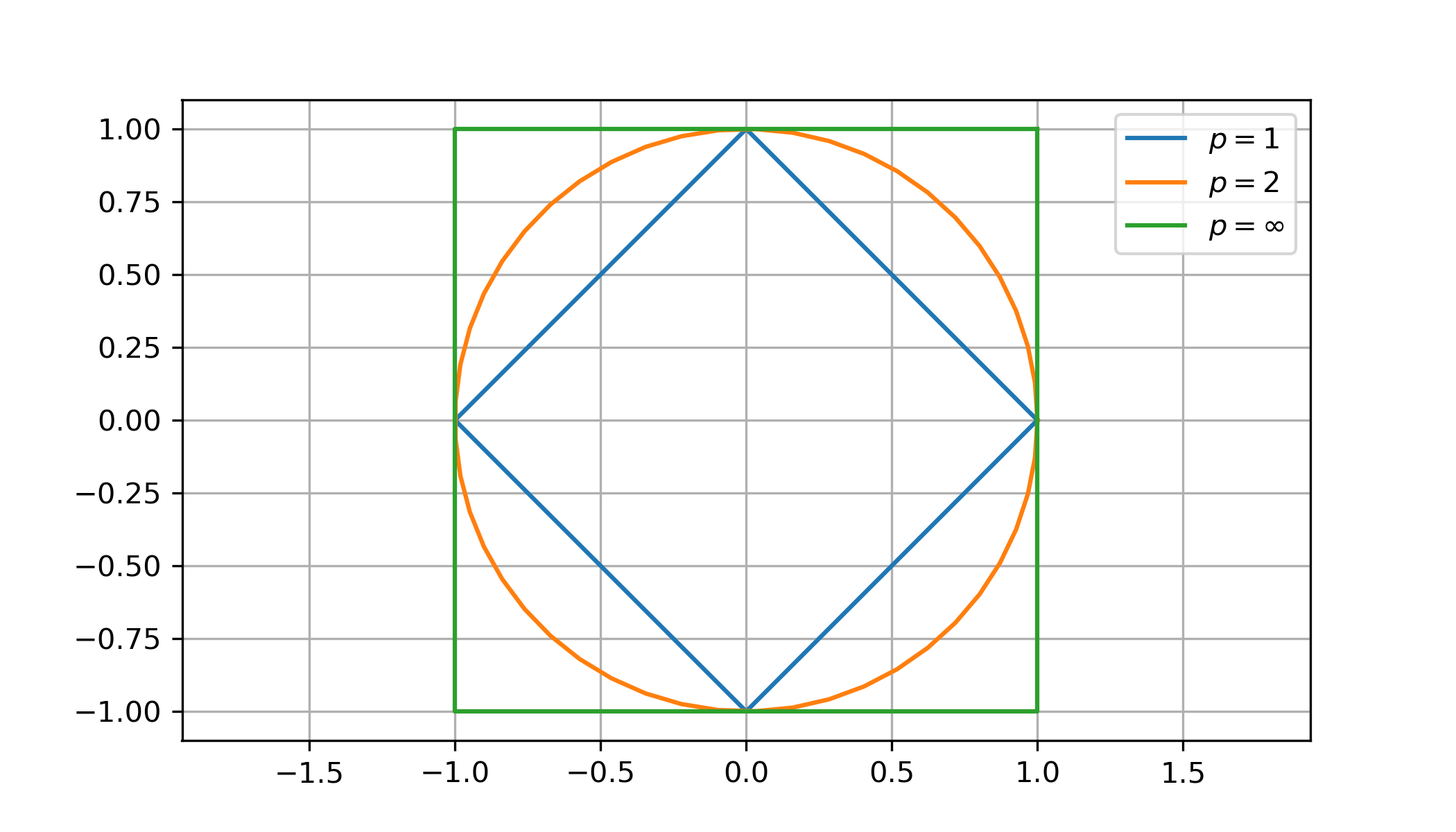
The most commonly used vector norm is the 2-norm. If we use the notation \(\| \boldsymbol{x} \|\) then we assume it is the 2-norm unless explicitly stately otherwise.
Matrix Norms#
A matrix norm is a function on matrices that satisfies the properties:
\(\| A \| > 0\) for all \(A \not= 0\)
\(\| A \| = 0\) if and only \(A = 0\)
\(\| c A \| = |c| \| A \|\) for any \(c \in \mathbb{R}\)
\(\| A + B \| \leq \| A \| + \| B \|\)
\(\| A B \| \leq \| A \| \| B \|\)
The Frobenius norm of a matrix \(A\) is given by
where \(a_{i,j}\) are the entries of \(A\)
The operator norm of a matrix \(A\) is given by
where \(\| \cdot \|\) is the 2-norm.
The operator norm satisies the property \(\| A \boldsymbol{x} \| \leq \| A \| \| \boldsymbol{x} \|\) for all \(\boldsymbol{x} \in \mathbb{R}^n\).
An operator norm is a matrix norm.
The operator norm and the previous result gives us most of the matrix norms used in practice.
Let \(A\) be a nonsingular matrix. Then
In other words, \(\| A \|\) is the maximum stretch of a unit vector by the linear transformation \(A\), and \(\| A^{-1} \|\) is the reciprocal of the minimum stretch of a unit vector by the linear transformation \(A\).
Proof
Note that \(\| A \boldsymbol{x} \| / \| \boldsymbol{x} \|= \| A ( \boldsymbol{x} / \| \boldsymbol{x} \| ) \|\) therefore
Similarly, we can rearrange the definition of \(\| A^{-1} \|\) to find:
Let \(D\) be a diagonal matrix and let \(\boldsymbol{d}\) be the vector of diagonal entries of \(D\):
Then \(\| D \| = \| \boldsymbol{d} \|_{\infty} = \max \{ |d_1| , \dots, |d_n| \}\), and \(\| D \|_F = \| \boldsymbol{d} \|_2\).
Proof
Compute
The equality \(\| D \|_F = \| \boldsymbol{d} \|_2\) is clear.
How do we compute the matrix norm \(\| A \|\) for a general matrix? This is a nontrivial problem and we will see later how to use the singular values of \(A\) to determine the matrix norm.
Condition Number#
The condition number of a nonsingular square matrix \(A\) is
By convention, we define \(\mathrm{cond}(A) = \infty\) if \(\det(A) = 0\).
If \(A\) is nonsingular, we have
The image below shows the unit circle and its image under the linear transformation defined by a \(2 \times 2\) matrix \(A\). Determine \(\| A \|\), \(\| A^{-1} \|\) and \(\mathrm{cond}(A)\).
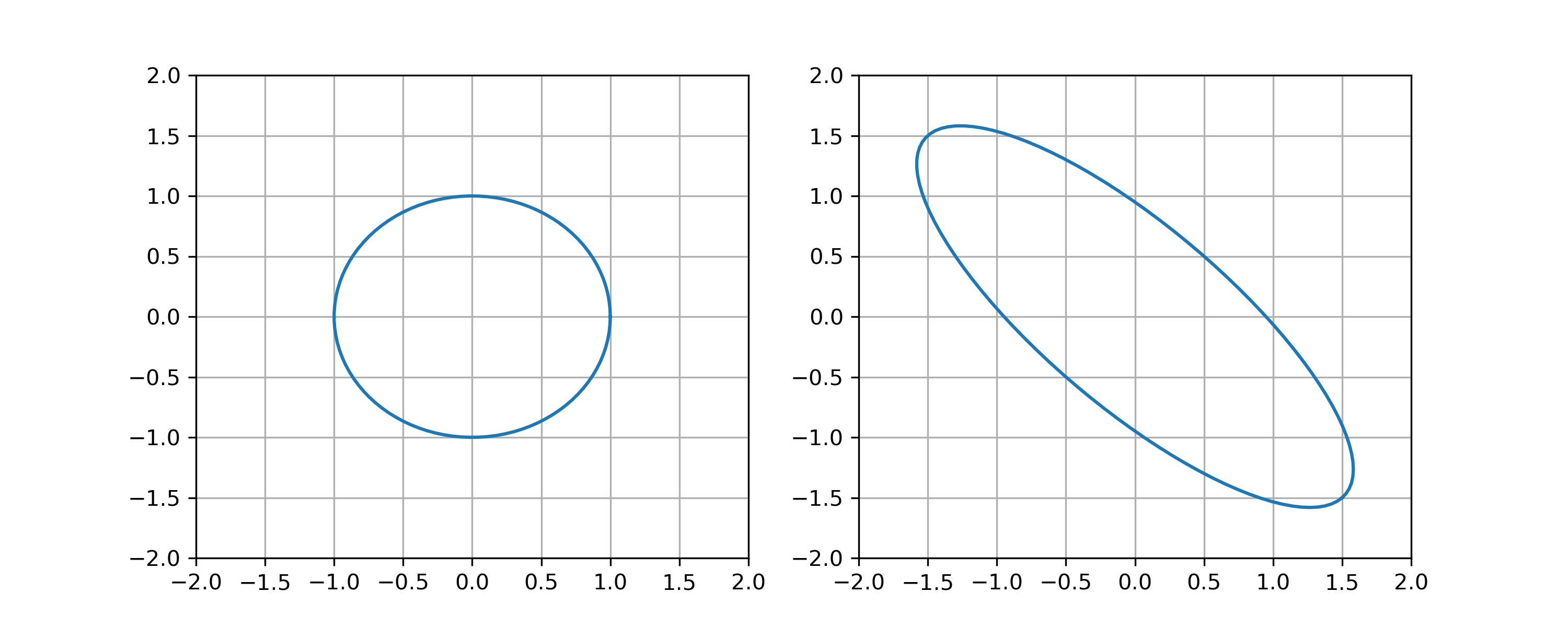
Observe the maximum stretch of a unit vector is \(\| A \| = 3 / \sqrt{2}\), the minimum stretch is \(1/\sqrt{2}\) therefore \(\| A^{-1} \| = \sqrt{2}\) and the condition number is \(\mathrm{cond}(A) = 3\).
Relative Errors#
Let \(A\) be a nonsingular matrix and consider the linear system \(A \boldsymbol{x} = \boldsymbol{b}\). If a small change \(\Delta \boldsymbol{b}\) corresponds to a change \(\Delta \boldsymbol{x}\) in the sense that \(A(\boldsymbol{x} + \Delta \boldsymbol{x}) = \boldsymbol{b} + \Delta \boldsymbol{b}\), then
Proof
Since \(A \boldsymbol{x} = \boldsymbol{b}\), we have \(\Delta x = A^{-1} \Delta \boldsymbol{b}\). Computing norms we find
Given a vector \(\boldsymbol{b}\) and small change \(\Delta \boldsymbol{b}\), the relative change (or relative error) is
The error bound
implies that if \(A\) has a large condition number then small changes in \(\boldsymbol{b}\) may result in very large changes in the solution \(\boldsymbol{x}\). In other words, the solution \(\boldsymbol{x}\) is sensitive to errors in \(\Delta \boldsymbol{b}\).
Exercises#
Show that the 1-norm satisfies the properties of a norm.
Solution
We need to show that the 1-norm satisfies all four properties of a vector norm:
\(||x||_1 = |x_1| + |x_2| + ... + |x_n| \geq 0\) for any \(x \in \mathbb{R}^n\)
\(||x||_1 = |x_1| + |x_2| + ... + |x_n| = 0 \iff |x_1| = |x_2| = ... = |x_n| = 0 \)
\(||cx||_1 = |cx_1| + |cx_2| + |cx_3| + ... + |cx_n| = |c|(|x_1| + |x_2| + ... + |x_n|) = |c|||x||_1\) for any \(c \in \mathbb{R}\)
\(||x + y||_1 = |x_1 + y_1| + |x_2 + y_2| + ... + |x_n + y_n| \leq |x_1| + |y_1| + |x_2| + |y_2| + ... + |x_n| + |y_n| = ||x||_1 + ||y||_1\) for any \(x, y \in \mathbb{R}^n\)
Show that the \(\infty\)-norm satisfies the properties of a norm.
Solution
We need to show that the \(\infty\)-norm satisfies all four properties of a vector norm:
\(||x||_{\infty} = \max\{|x_1|, |x_2|, ..., |x_n|\} \geq 0\) for any \(x \in \mathbb{R}^n\)
\(||x||_{\infty} = \max\{|x_1|, |x_2|, ..., |x_n|\} = 0 \iff |x_1| = |x_2| = ... = |x_n| = 0 \)
\(||cx||_{\infty} = \max\{|cx_1|, |cx_2|, ..., |cx_n|\} = |c|\max\{|x_1|, |x_2|, ..., |x_n|\} = |c|||x||_{\infty}\) for any \(c \in \mathbb{R}\)
\(||x + y||_{\infty} = \max\{|x_1 + y_1|, |x_2 + y_2|, ..., |x_n + y_n|\} \leq \max\{|x_1| + |y_1|, |x_2| + |y_2|, ..., |x_n| + |y_n|\} = ||x||_{\infty} + ||y||_{\infty}\) for any \(x, y \in \mathbb{R}^n\)
Is the function \(\| \boldsymbol{x} \| = x_1 + \cdots + x_n\) a vector norm? Explain.
Solution
It is not. We can show that it violates the 2nd condition of a norm.
Choose the vector \(x = (1,-1,0,\cdots,0)\), we have the “norm”:
The function
does not satisfy the triangle inequality if \(0 < p < 1\). Prove this for \(n=2\) and \(p=0.5\). In other words, find vectors \(\boldsymbol{x},\boldsymbol{y} \in \mathbb{R}^2\) such that
Is it true that \(\| \boldsymbol{x} \|_1 \leq \| \boldsymbol{x} \|_2 \leq \| \boldsymbol{x} \|_{\infty}\) for all \(\boldsymbol{x} \in \mathbb{R}^n\)? Explain.
Solution
This is not true. The correct inequalities are:
Proof: \( \| \boldsymbol{x} \|_{\infty} = \max \{ |x_1|, |x_2|, ..., |x_n| \} \leq \sqrt{x_1^2 + x_2^2 + ... + x_n^2} = \| \boldsymbol{x} \|_2 \) by the Cauchy-Schwarz inequality.
Additionally, \( \| \boldsymbol{x} \|_2 = \sqrt{x_1^2 + x_2^2 + ... + x_n^2} \leq |x_1| + |x_2| + ... + |x_n| = \| \boldsymbol{x} \|_1 \) by the triangle inequality.
Therefore, \(\| \boldsymbol{x} \|_{\infty} \leq \| \boldsymbol{x} \|_2 \leq \| \boldsymbol{x} \|_1\).
Determine whether the statement is True or False: If \(\| A \| = 1\) then \(A = I\).
Solution
This is false, but the converse is true.
We can give a counterexample with the following diagonal matrix with the max diagonal entry of 1:
\(A = \begin{pmatrix} 0.5 & 0 \\ 0 & 1 \end{pmatrix} \Longrightarrow ||A|| = 1\) but \(A \neq I_2\)
We can come up with similar diagonal matrices for the \(n \times n\) case.
Suppose \(A\) is a 2 by 2 matrix such that the image of the unit circle under the linear transformation \(A\) is:
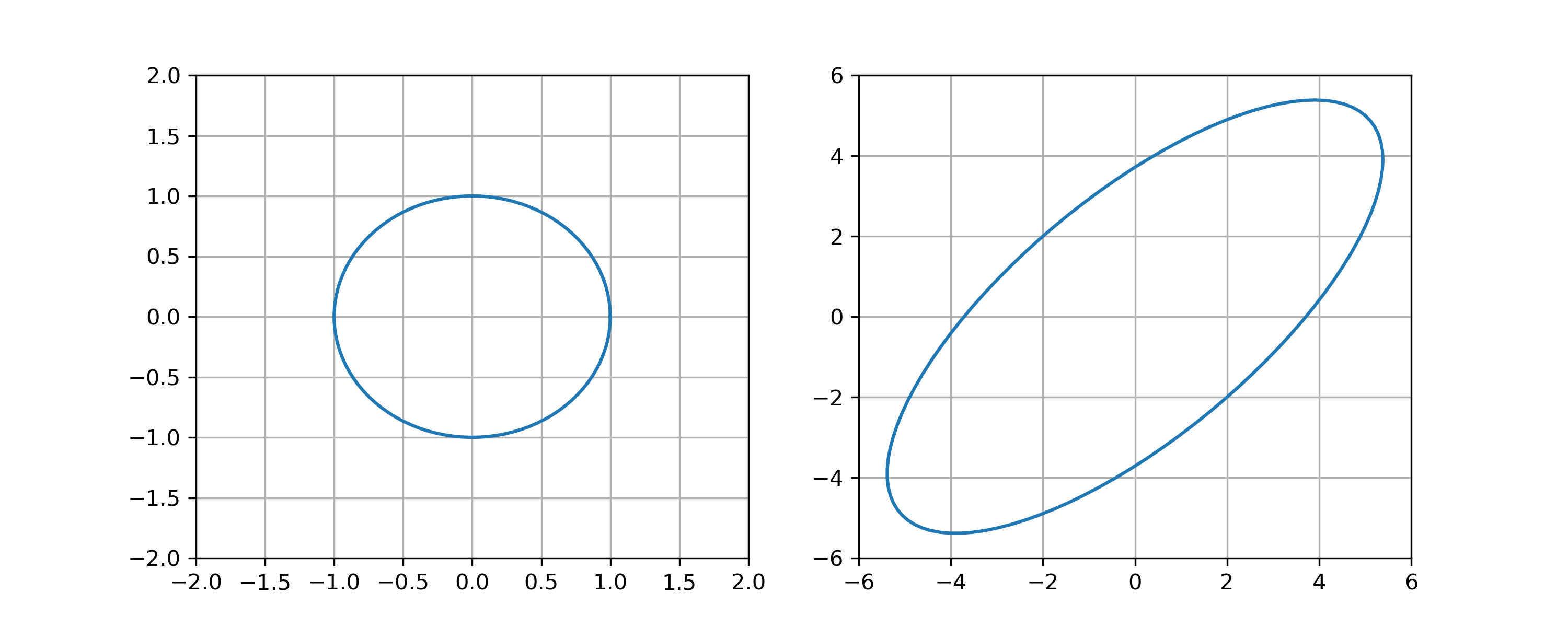
Determine \(\mathrm{cond}(A)\) with respect to the 1, 2, and \(\infty\) norm.
Solution
We begin by computing the operator norm with respect to the 2 -norm. From the definition of the operator norm we have
Since the values in the left plot are exactly those on the unit sphere we must only identify the vector \(A x\) that has been stretched the most i.e. \(A x=(5,5)\) Thus
Similarly for \(\left\|A^{-1}\right\|\) the vector least stretched is \(A x=(-2,2)\) thus
So that we find that
For the 1 and \(\infty\) norm, we realize that the vectors \(v_{1}=\frac{1}{\sqrt{2}}(1,1)\) and \(v_{2}=\frac{1}{\sqrt{2}}(-1,1)\) are eigenvectors i.e.
Thus we have the diagonalization:
and the inverse
Then, we compute the condition number: